 汽车
汽车 物流
物流 建筑
建筑 家具
家具 仓储
仓储 包装
包装 物料搬运解决方案
物料搬运解决方案 系统整合
系统整合 连接应用
连接应用 机器人集成
机器人集成 激光应用
激光应用 软件应用
软件应用 视觉应用
视觉应用 关于 AWL
关于 AWL 可持续性
可持续性 合作伙伴
合作伙伴 全球董事会
全球董事会 供应商
供应商物品拾取
迈向材料搬运机器人化的一步
由于配送中心处理的物品种类繁多,所以在很长的时间里,使用机器人进行拾取并不切实际。但有了我们的机器人解决方案及视觉和抓手技术,这种情况现在已成历史。

与只能执行预编程任务的传统机器人不同,AWL 的拾取解决方案可以灵活适应动态工业环境和不可预测的情况,比如订单量高峰期,千变万化的包裹类型、形状和大小。
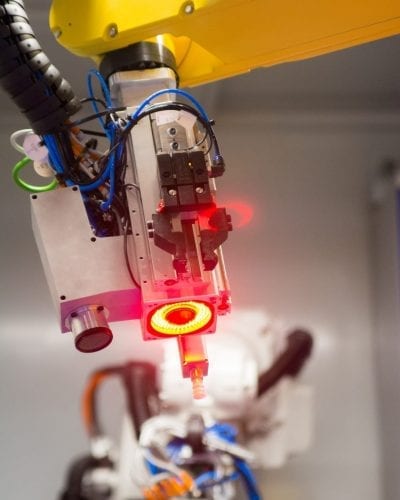
视觉技术
我们将我们的拾取能力部署到电子商务、邮政和快递等领域。我们提供的机器可以借助我们的视觉技术识别包装箱内或传送带上随机定向的物品的拾取点。借助此视觉技术,机器人可以收到物品拾取和搬运命令。
视觉技术是整个自动化过程不可或缺的一部分。对我们来说,视觉技术是机器人的眼睛。AWL 可以为您提供完整的自动化解决方案。我们了解您运营的业务,并希望定义相应的机器概念,以便您可以进行后续工作。PLC、机器人技术和视觉软件的整合对于保持稳定性和达到所需限制至关重要。

抓手技术
AWL 在开发适当的抓手技术方面经验丰富,并且知道如何充分利用 3D 打印。我们的拾取解决方案源自视觉技术和抓手技术的结合,可以实现飞速取放各种物品并满足交货时间。
机器人智能
我们部署的机器人既可以单独使用,也可以与同一站点上的人员结合使用。它是模块化产品,因此易于扩展。机器人还可以通过学习来提高自己,而使用的软件则可以识别何时拾取失败,从而不断扩展成功拾取的数据库。
想知道 AWL 能为您的物流流程自动化做些什么?请联系我们!
Ensuring global productivity.
跟着我们
AWL-Techniek Holding B.V.